|
|
Automated nano-manipulation
Supported in part by NSF CPS: Small: Collaborative
Research: Automated and Robust Nano Assembly with Atomic Force Microscopes
(Award # 1035844)
o This
research aims to develop a cyber-physical approach for automating
manipulation of nanoscale particles, tubes, and wires via atomic force
microscopes with the eventual goal of nanoscale device prototyping.
|

Snapshot of
an AFM instrument (Agilent 5500) in our lab
|
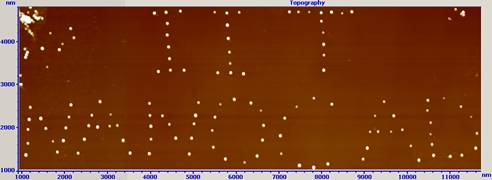
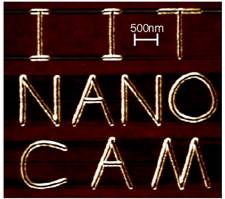
AFM
manipulation of latex particles (50nm) to form "IIT NANO CAD"
|
 AFM based nano indentation (Xu,
Yang and Qian 2013) AFM based nano indentation (Xu,
Yang and Qian 2013)
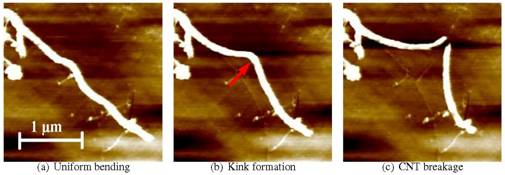
CNT bending behaviors (Yang and Qian
2013)
Recent publications:
1. Yang, S. C. and Qian, X.,
"Controlled manipulation of flexible carbon nanotubes through
shape-dependent pushing by atomic force microscopy," Langmuir,
Vol. 29, No. 37, pp. 11793 - 11801, 2013.
2. Xu, K., Yang, S. and Qian, X.,
"Integrating CAD and Nano-Indentation for Complex Lithography",
ASME Journal of Micro and Nano-Manufacturing, Vol. 1, No. 1, pp.
011002, 2013. [pdf]
3. Xu,
K., Kalantari, A. and Qian, X., "Efficient AFM based nanoparticle
manipulation via sequential parallel pushing", IEEE Transactions on
Nanotechnology, Vol. 11, No. 4, pp. 666-675, 2012.[pdf]
4. Zhao,
W., Xu, K., Qian, X. and Wang, R., "Tip based Nano Manipulation
through Successive Directional Push," ASME Journal of Manufacturing
Science and Engineering, Special Issue on Nano Manufacturing, Volume
132, Issue 3, 030909, June 2010.
5 Zhang, D. and Qian, X.,
"Adaptive Scanning in Atomic Force Microscopy" Proceedings of
2009 IEEE Conference on Robotics and Automation (ICRA), Kobe, Japan, May
2009.
|